About SPENCER
Summary
Motivated by the increasing number of robots that share a space with people, SPENCER will break new ground for cognitive systems in human environments. While there is an increasing trend towards socially aware robots, previous research is still limited in its capacity to perceive, learn and model human social behavior and to use this knowledge to plan appropriate actions in real-time from mobile platforms. SPENCER will systematically address these problems and advance the fields of
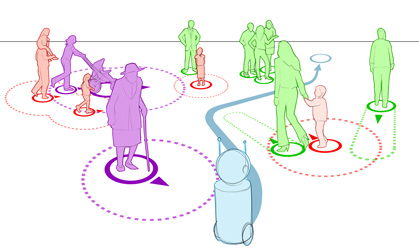
- robust detection, tracking and multi-person analysis of individuals and groups of people,
- recognition of human social relations, social hierarchies and social activities,
- normative human behavior learning and modeling,
- socially-aware task, motion and interaction planning,
- learning socially annotated maps in highly dynamic environments,
- empirical evaluations to assess socio-psychological effects of normative robot behaviors.
SPENCER will extend previous research by considering humans to be more than dynamic objects but as individuals with different attributes, social relations, social hierarchies, and social rules. A fundamental objective of the project is to demonstrate that for robots among humans, social compliance and task-efficiency is not a trade-off but can go hand in hand.
By addressing these problems jointly and in a multi-disciplinary project team, the SPENCER consortium will exploit synergies that will enable us to better understand human-robot relationships in populated environments and to better design effective cognitive systems that operate robustly and safely among humans.
Demonstration Scenario and Applications
The project is also motivated by actual challenges in the aviation industry. KLM, the end-user in the consortium, considers the technologies developed in SPENCER as highly relevant for the area of transfer passenger services. As with other hub airports, up to 80% of passenger traffic at their home base Schiphol in Amsterdam is due to transfer passengers whose efficient handling is a significant operational challenge. An important bottleneck are transfer passengers that have to go through the Schengen passport control in order to catch a connecting flight to Schengen countries. Every day, people miss their connections due to delayed arrivals, short disembark-embark times, wayfinding problems, language and alphabet barriers, or other reasons. Thus, the SPENCER consortium will deploy a robotic demonstrator for smart passengers flow management whose tasks include guidance of short-transfer time passengers from their gate of arrival to the priority lane of the Schengen barrier and mobile information provision. The deployment is an excellent benchmark of the research developed in SPENCER given the demanding nature of airports as highly populated environments and has a large exploitation potential within and beyond the aviation industry.
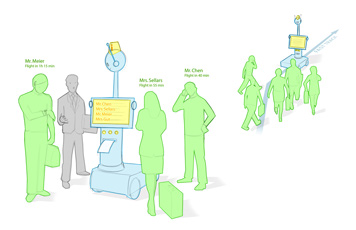

The SPENCER consortium will integrate the developed technologies onto a robot platform whose task consist in picking up short-transfer time passenger groups at their gate of arrival, identifying them with an on-board boarding pass reader, guiding them to the Schengen barrier and instructing them to use the priority track. Additionally, the platform will be equipped with a KLM information kiosk and provide services to passengers in need of help.
The project is also expected to have an impact on our society by laying the foundation for new studies about robots in everyday life. The resulting technologies and insights will inform the work of organizations, local governments, robot developers and researchers in cognitive systems and social science allowing them to take advantage of these new capabilities in understanding human group behaviors with relevance to such diverse social challenges as international travel, emergency response, eduation and healthcare.
Work Plan
The work plan of SPENCER is organized into the following eight work packages:
Nr. |
Description and Tasks |
Responsible |
WP1 |
Requirement Analysis, Platform Specification and Design
Task 1.1: Requirement Analysis |
BlueBotics SA (BLUE) |
WP2 |
Far-Range Perception: People and Object Analysis
Task 2.1: People Detection and Tracking |
Technische Universität |
WP3 |
Close-Range Perception: Human Attribute Analysis
Task 3.1: Human Attribute Classification |
Rheinisch-Westfälische Technische |
WP4 |
Group-Level Analysis and User Studies
Task 4.1: Behavior Evaluation Through User Studies |
Universiteit Twente (UT) |
WP5 |
Behavior Learning and Planning
Task 5.1: Learning Simple Normative Behaviors |
Albert-Ludwigs-Universität |
WP6 |
System Integration, Deployment, and Evaluation
Task 6.1: System Integration |
Centre National de la Recherche |
WP7 |
Dissemination and Exploitation
Task 7.1: Dissemination | Örebro University (ORU) |
WP8 |
Management
Task 8.1: Administrative and Financial Management | Albert-Ludwigs-Universität |